
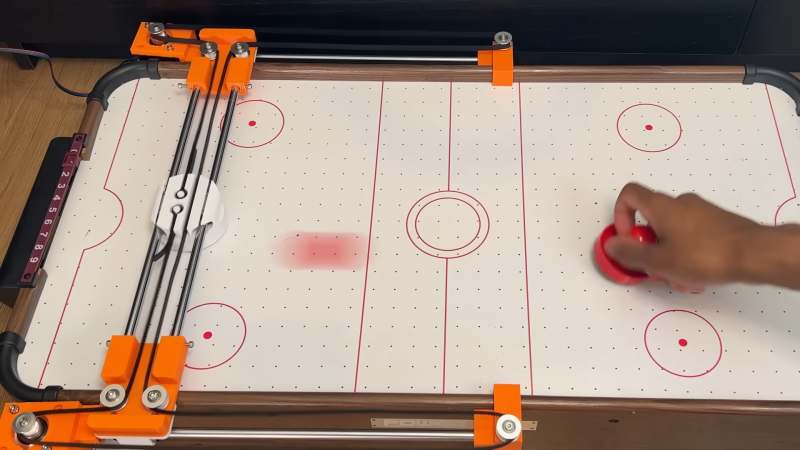
Air hockey is a fun game, but it’s one you can’t play by yourself. That is, unless you have a smart robot hockey player to act as your rival. [Zeroshot] built exactly that.
The build is based around a small 27-inch air hockey table—not exactly arcade-spec, but big enough to demonstrate the concepts at play. The robot player moves its mallet in the X and Y axes using a pair of NEMA17 stepper motors and an H-belt configuration. To analyze the game state, there’s a Raspberry Pi 3B fitted with a camera, and it has a top-down view of the board. The Pi gives the stepper motors commands on how to move the mallet via an Arduino that communicates with the stepper drivers. The Pi doesn’t just aim for the puck itself, either. With Python and OpenCV, it tries to predict your own moves by tracking your mallet, and the puck, too. It predicts the very-predictable path of the puck, and moves itself to the right position for effective defence.
Believe it or not, we’ve featured quite a few projects in this vein before. They’ve all got their similarities, and their own unique quirks. Video after the break.
[Thanks to hari wiguna for the tip!]
This articles is written by : Fady Askharoun Samy Askharoun
All Rights Reserved to Amznusa www.amznusa.com
Why Amznusa?
AMZNUSA is a dynamic website that focuses on three primary categories: Technology, e-commerce and cryptocurrency news. It provides users with the latest updates and insights into online retail trends and the rapidly evolving world of digital currencies, helping visitors stay informed about both markets.
